
 EN
EN
 EN
EN ZH
ZH IT
IT ES
ES TH
TH TR
TR JA
JA PT
PT KO
KO RU
RU FR
FR DE
DE AR
AR
 Casa > Centro de productos > Módulo de junta planetaria > Módulo de articulación planetaria liviano de carga baja LZ5710
Casa > Centro de productos > Módulo de junta planetaria > Módulo de articulación planetaria liviano de carga baja LZ5710
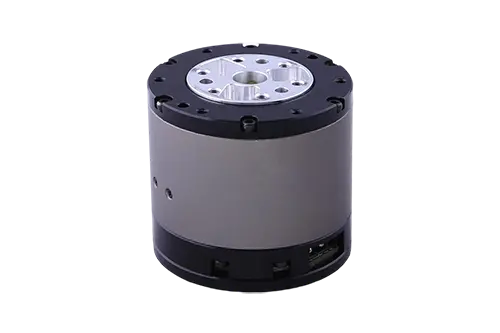
Módulo de articulación planetaria liviano de carga baja LZ5710
Peso: 1420g±20g
Número de polos: 42 polos
Número de fases: 3 fases
Método de accionamiento: FOC (control orientado al campo)
Relación de reducción: 10:1
Tecnología FOC de hardware completo, desarrollo FPGA a nivel de chip
Cableado hueco
Control de triple bucle con todas las frecuencias a 20 KHz para una respuesta rápida
etherCat/canBus abierto
ADC de 16 bits con frecuencia de muestreo de 1 MHz
Freno de apagado
La tecnología central del producto radica en el módulo de articulación integrada armónica, que presenta un diseño integrado de control de accionamiento. La estructura del rotor interno permite el cableado hueco, mientras que las opciones de modelos diversificadas, incluidas las series 11, 14, 17, 20, 25, 32 y 40, garantizan aplicaciones flexibles. Con un perfil compacto y miniaturizado y bajo consumo de energía, adopta un mecanismo de freno tipo pasador que activa el bloqueo mecánico instantáneamente ante una pérdida de energía, con un tiempo de acción de menos de 10 ms.
El diseño de doble rueda de acero, que integra rodamientos de rodillos transversales con ruedas de acero, reduce la ocupación del espacio axial. Al engranar dos ruedas de acero con un flexspline, se mitiga la tensión provocada por la deformación del flexspline, logrando un funcionamiento suave, alta eficiencia y precisión de posicionamiento de hasta 20 segundos de arco.
Diseño ultracompacto y liviano
Dimensiones: Diámetro Ø57 mm × Alto 46 mm, pesa solo 300 g: este es un módulo de articulación compacto.
Estructura no hueca, de diseño más sencillo y menor coste, adecuada para uniones extremas que no requieren cableado.
Soluciones maduras de conducción y comunicación
Modo de conducción: control FOC orientado al campo, con control de triple bucle para par, velocidad y posición, ideal para control de juntas de alta precisión.
Comunicación: interfaz CAN/CAN FD, compatible con los principales controladores de robots, cableado simple y fuerte capacidad antiinterferencias.
Configuración de codificador magnético dual: codificador magnético + codificador dual, que admite control de circuito cerrado dual tanto en el lado del motor como en el lado de salida para mejorar la precisión del posicionamiento.
Fiabilidad y adaptabilidad medioambiental
Rango de temperatura: -20~60°C, que cubre condiciones de funcionamiento típicas desde ambientes interiores hasta semiexteriores.
Ruido: ≤55 dB(A); Diseño silencioso, ideal para escenarios de colaboración entre humanos y robots.
Clase de aislamiento: Clase B, lo que garantiza confiabilidad operativa a largo plazo.
Tipo de rodamiento: Rodamiento rígido de bolas, estructura simple, bajo costo de mantenimiento.
Este LZ5710N es un módulo de unión plug-and-play, liviano y de bajo consumo, diseñado para aplicaciones de carga liviana. Sus ventajas clave incluyen: un par nominal de 3 Nm, un bajo juego de solo 7 minutos de arco, control impulsado por FOC, comunicación CAN y codificadores magnéticos duales. Es ideal como efector final, articulación de muñeca o tobillo para exoesqueletos o robots colaborativos, y también es perfecto para el rápido desarrollo de pequeños robots educativos y de investigación.
| Modelo | LZ4610N No hueco | LZ4605N No hueco | LZ5710N No hueco | LZ5740N No hueco | LZ5736N No hueco | LZ807.75N No hueco | LZ8025CN No hueco | LZ10028CH Eje hueco | LZ12028CH Eje hueco |
|---|---|---|---|---|---|---|---|---|---|
| Tipo de reductor | Planetario | Planetario | Planetario | Planetario | Planetario | Planetario | Planetario | Planetario | Planetario |
| Método de conducción y control | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
| Dimensiones Diámetro × Alto (mm) | Φ46×38 | Φ46×38 | Φ57×46 | Φ57×60 | Φ57×70 | Φ80×47 | Φ80×60,5 | Φ100×68 | Φ120×80 |
| Relación de engranajes | 10 | 5 | 10 | 40 | 36 | 7,75 | 25 | 28 | 28 |
| Par nominal (N・m) | 0,85 Nm | 0,4 Nm | 3,4 Nm | 12Nm | 29Nm | 7,75 Nm | 27Nm | 67,5 Nm | 126Nm |
| par máximo (N・m) | 2,55 Nm | 1,2 Nm | 10,2 Nm | 36Nm | 80Nm | 23,2 Nm | 81Nm | 200Nm | 378Nm |
| Codificador magnético | Codificador doble | Codificador doble | Codificador doble | Codificador doble | Codificador doble | Codificador doble | Codificador doble | Codificador doble | Codificador doble |
| potencia nominal (W) | 83 | 30 | 94 | 94 | 300 | 400 | 380 | 733 | 1570 |
| Tensión nominal (V) | CC48V | CC48V | CC48V | CC48V | CC48V | CC48V | CC48V | CC48V | CC48V |
| Modo de comunicación | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CANFD/Éter CAT | CANFD/Éter CAT |
| Rango de temperatura de funcionamiento (°C) | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~70°C | -20~70°C | -20~80°C | -20~80°C |
| Clase de aislamiento | Clase B | Clase B | Clase B | Clase B | Clase B | Clase B | Clase B | Clase B | Clase B |
| Velocidad sin carga (rpm) | 110 | 220 | 210 | 112 | 130 | 645 | 156 | 143 | 140 |
| Velocidad nominal (rpm) | 80 | 160 | 140 | 80 | 100 | 516 | 120 | 110 | 107 |
| Corriente nominal (Apk) | 1.3 | 4.5 | 3 | 6 | 8 | 10.4 | 10.7 | 22 | 41,6 |
| Corriente máxima (Apk) | 3.8 | 13.5 | 9 | 9 | 16 | 20.8 | 30 | 66 | 83.2 |
| Contragolpe (arcmin) | ≤7arcmin | ≤7arcmin | ≤7arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin |
| Constante de contra-EMF | 1,54 V/krpm | 1,54 V/krpm | 7,1 V/krpm | 7,1 V/krpm | 7,52 V/krpm | 0,1528 V/rad | 7,45 Vrms/krpm | 9Vrms/krpm | 8V/krpm |
| Constante de par | 0,025 Nm/A | 0,025 Nm/A | 0,1 Nm/A | 0,1 Nm/A | 0,124 Nm/A | 0,09143 Nm/A | 0,15 Nm/A | 0,15 Nm/A | 0,12 Nm/A |
| Conteo de etapas | 10 | 10 | 28 | 28 | 28 | 28 | 28 | 42 | 42 |
| Conexión de bobina | Conexión en estrella | Conexión en estrella | Conexión en estrella | Conexión en estrella | Conexión en estrella | Conexión en estrella | Conexión en estrella | Conexión delta | Conexión delta |
| Tipo de rodamiento | Rodamiento de bolas | Rodamiento de bolas | Rodamiento de bolas | Rodamiento de bolas | Rodamiento de bolas | Rodamientos de rodillos transversales | Rodamientos de rodillos transversales | Rodamientos de rodillos transversales | Rodamientos de rodillos transversales |
| Ruido de trabajo (dB) | ≤55 | ≤55 | ≤55 | ≤58 | ≤60 | ≤65 | ≤65 | ≤65 | ≤70 |
| Peso (gramos) | 150 | 150 | 300 | 360 | 450 | 430 | 850 | 1550 | 2270 |
| Número de fases | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |

